基于Matlab与DSP的直线电机高精度位置控制系统设计与实现
直线电机作为一种直接驱动装置,因其结构简单、响应快、精度高等优点,在精密制造、半导体设备和自动化领域得到广泛应用。本文结合Matlab仿真与DSP硬件平台,详细阐述实现直线电机精准位置控制的完整技术方案。
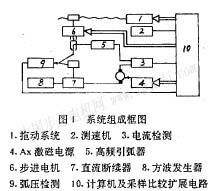
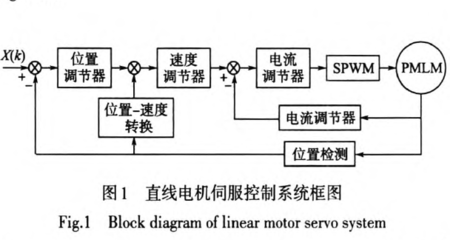
一、系统架构设计
系统采用分层控制结构:上位机使用Matlab/Simulink进行控制算法设计、参数整定和动态仿真;下位机以TI TMS320F28335 DSP为核心执行实时控制。位置反馈采用高精度光栅尺,分辨率达1μm,构成全闭环控制系统。
二、Matlab仿真建模
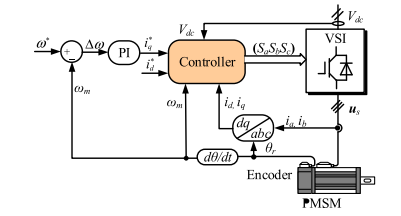
- 建立直线电机数学模型:考虑推力波动、端部效应等非线性因素,推导电压方程和机械运动方程。
- 设计控制算法:采用前馈补偿与PID控制相结合的策略。前馈控制器抵消系统主要非线性,PID控制器消除稳态误差。通过Matlab的System Identification工具箱辨识电机参数,利用Control System工具箱设计控制器并优化参数。
- 仿真验证:在Simulink中搭建控制系统模型,进行阶跃响应、正弦跟踪等测试,验证控制策略的有效性。
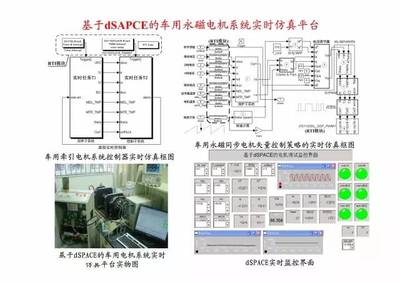
三、DSP硬件实现
- 硬件配置:DSP主频150MHz,通过QEP接口采集编码器信号,PWM模块输出驱动信号。外设包括ADC采样电流、DA输出监视信号。
- 软件设计:采用CCS开发环境,将Matlab生成的C代码移植到DSP。实现位置环、速度环双闭环控制,控制周期100μs。关键代码包括:
- 位置检测与滤波算法
- 数字PID控制器(带抗饱和)
- 前馈补偿计算
- 安全保护逻辑
- 系统调试:通过Matlab的Embedded Coder工具生成代码,利用串口通信实现DSP与Matlab的在线参数调整和数据监视。
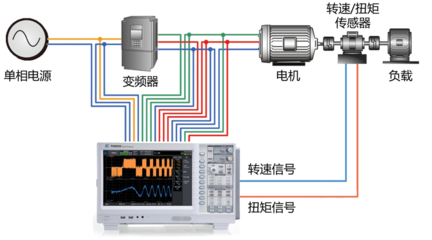
四、实验与优化
搭建测试平台,采用激光干涉仪校准位置精度。通过反复调试,最终实现:
- 定位精度:±2μm
- 重复定位精度:±1μm
- 最大速度:2m/s
- 调节时间:<50ms(针对10mm阶跃)
系统在应对负载扰动和参数变化时表现出良好鲁棒性,满足工业应用要求。本文方案为直线电机控制系统研发提供了完整的理论分析、仿真验证和工程实现参考。
如若转载,请注明出处:http://www.sfsh-skf.com/product/27.html
更新时间:2026-04-16 00:19:51