基于PIC16F873单片机的步进电机控制系统设计
步进电机作为一种将电脉冲信号转换为精确角位移的执行元件,因其控制简单、定位准确、无需反馈即可实现开环控制等优点,在自动化设备、精密仪器、消费电子等领域有着广泛应用。本文将以Microchip公司的PIC16F873单片机为核心控制器,探讨一种高效、稳定的步进电机控制系统设计方案,为相关领域的研发人员提供参考。
一、系统总体设计框架
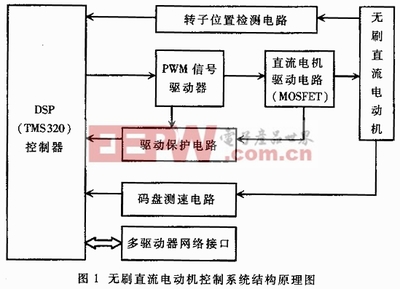
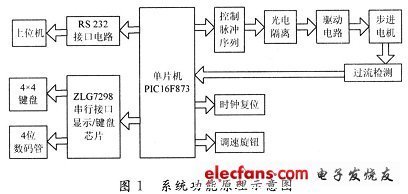
整个控制系统以PIC16F873单片机为控制核心,主要由以下几个部分构成:
- 主控单元:PIC16F873单片机,负责接收指令、运行控制算法、产生驱动脉冲序列。
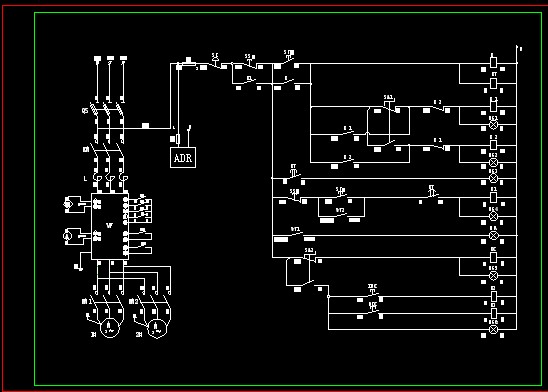
- 驱动电路:采用专用步进电机驱动芯片(如L298N、A4988等)或由分立元件构成的H桥电路,将单片机输出的弱电信号放大,以提供电机绕组所需的大电流和电压。
- 步进电机:作为被控对象,根据接收到的脉冲序列进行步进转动。
- 人机交互界面:可包括按键、旋转编码器用于输入控制指令(如启停、方向、速度),以及LCD或LED数码管用于显示当前状态(如速度、步数)。
- 电源模块:为单片机、驱动电路和电机提供稳定、隔离的电源。
系统工作流程为:用户通过输入设备设定目标参数,单片机根据预设算法(如加减速曲线)生成相应的脉冲频率(控制速度)和脉冲数量(控制位移),通过I/O口输出至驱动电路,最终驱动步进电机精确运行。
二、硬件电路设计要点
- 单片机选型与资源配置:PIC16F873是一款具有高性能RISC架构的8位CMOS单片机,内置4K字程序存储器、192字节RAM和128字节EEPROM。其拥有的3个I/O端口(PORTA, PORTB, PORTC)足以满足控制需求。通常分配2个I/O口输出两相脉冲信号(如RC0、RC1控制A相和B相),其余I/O口用于连接按键和显示模块。其内置的定时器/计数器(Timer0/1/2)可用于精确产生脉冲和实现PWM调速。
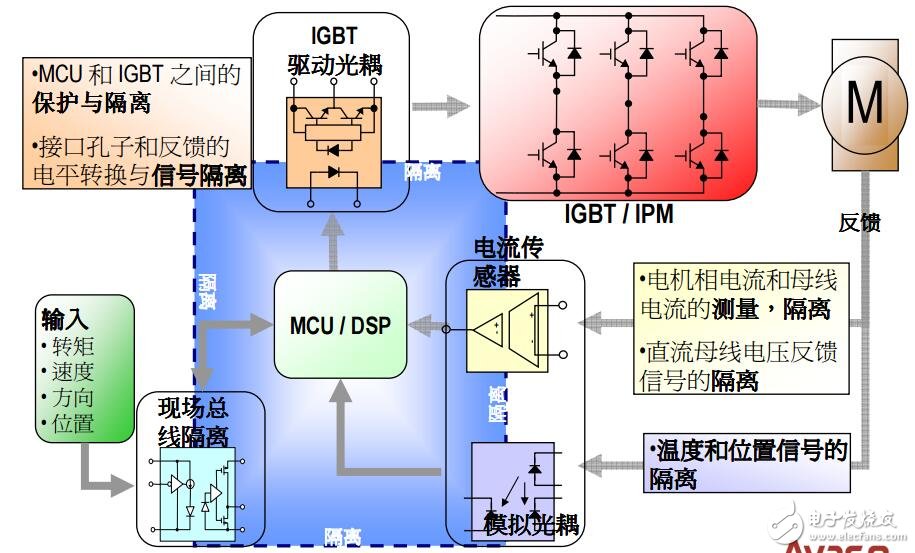
- 驱动电路设计:驱动电路是连接弱电控制与强电执行的关键。为保证系统稳定可靠,设计时需注意:
- 电流匹配:驱动芯片的输出电流需大于等于电机额定相电流。
- 电压适配:驱动电路的工作电压需匹配电机额定电压。
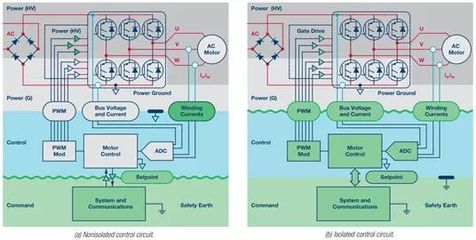
- 隔离保护:在单片机I/O口与驱动电路输入端之间,建议使用光耦隔离,以防止电机启停和换向时产生的感应电动势及电磁干扰损坏单片机。
- 续流二极管:在H桥的每个开关管旁必须并联续流二极管,为电机绕组的感应电流提供泄放回路,保护功率管。
- 电源与抗干扰设计:单片机与驱动电路应使用独立的稳压电源或通过磁珠、电感进行隔离滤波。PCB布局时,模拟地与数字地应单点连接,大电流走线应短而粗,并在关键芯片电源引脚就近布置去耦电容。
三、软件程序设计逻辑
软件程序是控制系统的灵魂,其核心在于脉冲序列的生成与运动控制算法的实现。
- 脉冲生成:可以利用单片机内部定时器中断来精确控制脉冲周期。通过改变定时器的重装值,即可灵活调节输出脉冲的频率,从而实现电机的调速。例如,在定时器中断服务程序中,对指定的I/O口进行取反操作,即可产生方波脉冲。
- 控制模式实现:
- 单四拍、双四拍、八拍模式:通过编程控制两相输出端口的电平逻辑顺序,可轻松实现不同的励磁方式,用户可根据对转矩、平稳性、分辨率的侧重进行选择。
- 方向控制:通过改变脉冲序列的循环顺序即可改变电机转向。
- 位置控制:通过累加或递减输出的脉冲个数,并与预设目标值比较,可实现精确定位。
- 加减速控制(S曲线/T曲线算法):为防止步进电机在高速启动/停止时出现失步或过冲,必须采用加减速控制。程序可以预置一个“速度-步数”对应表(如使用查表法),在启动阶段逐步提高脉冲频率(加速),在匀速阶段保持恒定频率,在停止前逐步降低频率(减速)。PIC16F873的运算能力足以完成此类算法的实时计算。
- 主程序流程:主程序通常包括系统初始化(I/O口、定时器、中断设置)、参数读取、状态显示以及根据当前模式调用相应的运动控制子程序。采用状态机或前后台(中断+主循环)的程序结构能使逻辑更清晰。
四、系统调试与优化
在软硬件设计完成后,需进行系统联调:
- 首先确保电源和最小系统正常工作。
- 单独测试驱动电路,确认其逻辑正确且功率部分无过热。
- 连接电机,从低速开始测试,逐步提高速度,观察电机运行是否平稳、有无异响和失步。
- 调试加减速曲线参数,找到兼顾效率与平稳性的最佳参数。
- 进行长时间运行测试,考核系统的稳定性和可靠性。
优化方向可包括:引入限位开关或原点传感器实现闭环参考点定位;通过RS-232或RS-485接口与上位机通信,实现更复杂的运动轨迹规划;利用PIC16F873的CCP模块实现更精细的PWM控制等。
###
以PIC16F873单片机为核心构建的步进电机控制系统,具有结构简洁、成本低廉、控制灵活的特点。通过合理的硬件电路设计和稳健的软件算法编程,该系统能够实现步进电机的精确位置控制、平滑速度控制以及稳定的运行性能,为各类自动化设备的运动控制部分提供了一个可靠、高效的解决方案。随着技术的进步,开发者还可以在此基础上集成更多的传感与通信功能,使其适应更复杂的应用场景。
如若转载,请注明出处:http://www.sfsh-skf.com/product/62.html
更新时间:2026-04-16 04:23:51